






Mikrokontroller PIC 16F877A
Menampilkan angka bergerak dari kanan ke kiri saat menekan salah satu keypad
Sebelum melakukan percobaan, kami dari kelompok 12 melakukan simulasi pada rangkaian yang akan di analisa menggunakan software Proteus guna untuk mengetahui apakah rangkaian tersebut berfungsi sesuai dengan tujuan percobaan. Untuk gambar rangkaiannya ada dibawah ini.


char txt[6];
// Keypad module connections
char keypadPort at PORTD;
// End Keypad module connections
// LCD module connections
sbit LCD_RS at RC0_bit;
sbit LCD_RW at RB4_bit;
sbit LCD_EN at RC1_bit;
sbit LCD_D4 at RC2_bit;
sbit LCD_D5 at RC3_bit;
sbit LCD_D6 at RC4_bit;
sbit LCD_D7 at RC5_bit;
sbit LCD_RS_Direction at TRISC0_bit;
sbit LCD_RW_Direction at TRISB4_bit;
sbit LCD_EN_Direction at TRISC1_bit;
sbit LCD_D4_Direction at TRISC2_bit;
sbit LCD_D5_Direction at TRISC3_bit;
sbit LCD_D6_Direction at TRISC4_bit;
sbit LCD_D7_Direction at TRISC5_bit;
void main()
{
Lcd_Init();
Lcd_Cmd(_LCD_CLEAR);
Lcd_Cmd(_LCD_CURSOR_OFF);
TRISD=0X00;
PORTD=0X03;
while(1)
{
if(PORTD.RD3==1 && PORTD.RD0==1)
{
Lcd_Out(1,6,"Selamat");
}
if(PORTC.RC1==0)
{
Lcd_Out(2,5,"PRATIKUM");
}
}
}
Rangkaian kami sudah berjalan sesuai dengan kondisi modul, dimaana saat rangkaian disimulasikan , maka LCD akan mengeluarkan karakter 'SELAMAt' pada baris atas LCD dan 'PRAKTIKUM' pada bagian bawah LCD.
Program mikrokontroller PIC ini kami buat dengan Softwre MIKROC PRO for PIC. Pada program PIC ini agak sedikit berbeda dalam peletakan lokasi karakter di LCD. pada baris bagian atas , itu dinamakan 1 , dan dibawahnya 2. jadi untuk membuat lokasi (1,6) dimana 1 berarti karakter tersebut terletak pada bagian atas LCD dan 6 berarti karakter tersebut dimulai dari kotak ke 6 dari kiri LCD.
Pada percobaan kali ini kami menggunakan Switch sebagai inputannya, Mikrokontroller PIC sbagai unit prosesing , dan LCD sebagai Output dari rangkaian.
Keypad mod 3
Mikrokontroller ATMEGA 8535
Buatlah rangkaian dengan menggunakan ATmega 8535 dimana terdapat Keypad dan 2 motor DC dan LCD . Apabila angka 2 pada keypad ditekan maka motor DC akan bergerak berlawanan arah jarum jam dan pada LCD akan muncul bergerak ke kiri
Sebelum melakukan percobaan, kami dari kelompok 12 melakukan simulasi pada rangkaian yang akan di analisa menggunakan software Proteus guna untuk mengetahui apakah rangkaian tersebut berfungsi sesuai dengan tujuan percobaan. Untuk gambar rangkaiannya ada dibawah ini.


$crystal = 16000000
Config Lcdpin = Pin , Rs = Portb.0 , E = Portb.1 , Db4 = Portb.2
Config Lcdpin = Pin , Db5 = Portb.3 , Db6 = Portb.4 , Db7 = Portb.5
Config Lcdpin = 16 * 2
Ddrc = &B1110000
Portc = &B11111111
Ddrb = &B11111111
Porta = &B00000000
Ddra = &B11111111
Config Porta = Output
Alias Logika Motor
In1 Alias Porta.0
In2 Alias Porta.1
In3 Alias Porta.2
In4 Alias Porta.3
Do
Portc = &B10000001
Waitms 10
If Pind.0 = 0 Then
Cls
Locate 1 , 4
Lcd " Monique"
Lowerline
Locate 2 , 6
Lcd "Sera"
Waitms 100
Porta = &B00001010
Waitms 50
Porta = &B00001010
Waitms 50
End If
Loop
End
Pada percobaan ini kami menggunakan keypad sebagai input, atmega 8535 sepagai mikrokontroller nya dan lcd dan Motor DC sebagai Output.
Saat keypad ditekan , maka LCD akan menampilkan kata "Monique" pada baris pertama dan "Sera" pada baris kedua, dan motor DC akan bergerak berlawanan jarum jam.
Untuk pengaturan Motor DC, jika 4 bit dibelakang dibuat 1010, maka motor akan berjalan berlawanan jarum jam, sdangkan jika pada program dibuat 0101, maka motor akan berjalan searah dengan jarum jam.
lcd mod 2
MIKROKONTROLLER ARDUINO 2560
Apabila dua buah switch ON dan tombol 2 ditekan maka LCD menampilkan kata “DUA” LED diubah menjadi 4 buah dengan kondisi hidup sebagian dan mati sebagian,begitu seterusnya.
Sebelum melakukan percobaan, kami dari kelompok 12 melakukan simulasi pada rangkaian yang akan di analisa menggunakan software proteus guna untuk mengetahui apakah rangkaian tersebut berfungsi sesuai dengan tujuan percobaan. Jika sesuai barulah percobaan dilakukan dengan peralatan yang ada di laboratorium. Untuk simulasinya, dapat diihat dibawah ini:


#include
int led1 = 13;
int led2 = 10;
int switch1 = 53;
int switch2 = 51;
int switch3 = 49;
int switch4 = 47;
const int PIN_RS = 12;
const int PIN_E = 11;
const int PIN_DB4 = 4;
const int PIN_DB5 = 5;
const int PIN_DB6 = 6;
const int PIN_DB7 = 7;
LiquidCrystal lcd(PIN_RS,PIN_E, PIN_DB4, PIN_DB5, PIN_DB6, PIN_DB7);
const byte BARIS = 4;
const byte KOLOM = 3;
char tombol[BARIS][KOLOM] = {
{'1','2','3'},
{'4','5','6'},
{'7','8','9'},
{'#','0','*'}
};
byte bariskeypad[BARIS] = { 14, 15, 16, 17 };
byte kolomkeypad[KOLOM] = { 18, 19, 20 };
Keypad kpd = Keypad( makeKeymap(tombol) ,bariskeypad, kolomkeypad, BARIS, KOLOM );
void setup()
{
lcd.begin(16,2);
pinMode(led1,OUTPUT);
pinMode(led2,OUTPUT);
pinMode (switch1, INPUT);
pinMode (switch2, INPUT);
pinMode (switch3, INPUT);
pinMode (switch4, INPUT);
digitalWrite(led1, LOW);
digitalWrite(led2, LOW);
Serial.begin(9600);
}
void loop()
{
if (digitalRead(switch1==0 && switch2==0 ))
{
char tombol = kpd.getKey();
if(tombol)
{
switch (tombol)
{
case '1':
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
delay(100);
lcd.clear();
lcd.setCursor(0,1);
lcd.print("SATU");
break;
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
delay(100);
lcd.clear();
lcd.setCursor(0,1);
lcd.print("DUA");
break;
default:;
Serial.println(tombol);
}
}
}
else
{
lcd.clear();
digitalWrite(led1, LOW);
digitalWrite(led2, LOW);
delay(100);
}
}
pada rangkaian percobaan, terdapat Keypad.dimana saat angka 1 pada keypad ditekan maka LCD akan mengluarkan angka 1 , saat angka 2 ditekan maka LCD akan mengeluarkan karakter DUA dan seterusnya.
Pada percobaan ini , Switch dan Keypad sbagai Inputannya, Mikrokontroller ADUINO 128 sebagai unit prosesing nya dan LCD sebagai OUtput rangkaian ini .
LCD
Mikrokontroller AT MEGA 128
Menampilkan angka bergerak dari kanan ke kiri saat menekan salah satu keypad
Sebelum melakukan percobaan, kami dari kelompok 12 melakukan simulasi pada rangkaian yang akan di analisa menggunakan software Proteus guna untuk mengetahui apakah rangkaian tersebut berfungsi sesuai dengan tujuan percobaan. Dibawah ini merupakan rangkaian simulasi dari percobaan kali ini:


#include
#include
char i;
void keypad()
{
PORTC=0b1111011; // Mengaktifkan angka yang ditekan pada Keypad di PORTC
delay_ms(10); // Delay 1 ms
if (PINC.4 == 0) // Jika menekan tombol keypad yg terhubung ke PINC.4 aktif low
{ for (i=0;i<=15;i++)
{
lcd_gotoxy(i-1,0); // Posisi tulisan pada LCD
lcd_putsf("Anda tekan 1"); // Mencetak tulisan pada LCD
delay_ms(50); // Delay selama 50 ms
lcd_clear(); // Membersihkan / reset LCD
};
}
PORTC=0b1111101; //Mengaktifkan angka yang ditekan pada Keypad di PORTC
delay_ms(1); // Delay selama 1 ms
if (PINC.4 == 0) // Jika menekan tombol keypad yg terhubung ke PINC.4 aktif low
{ for (i=15;i>=0;i--)
{
lcd_gotoxy(1,0); // Posisi tulisan pada LCD
lcd_putsf("Angka 2 ditekan"); // Mencetak tulisan pada LCD
delay_ms(50); // Delay selama 50 ms
lcd_clear(); // Membersihkan / reset LCD
}
}
PORTC=0b1111110; //Mengaktifkan angka yang ditekan pada Keypad di PORTC
delay_ms(1); // Delay selama 1 ms
if (PINC.4 == 0) // Jika menekan tombol keypad yg terhubung ke PINC.4 aktif low
{
lcd_gotoxy(1,0); // Posisi tulisan pada LCD
lcd_putsf("Anda Tekan 3"); // Mencetak tulisan pada LCD
delay_ms(50); // Delay selama 50 ms
lcd_clear(); // Membersihkan / reset LCD
}
else if (PINC.5 == 0) // Jika menekan tombol keypad yg terhubung ke PINC.4 aktif low
{
lcd_gotoxy(1,0); // Posisi tulisan pada LCD
lcd_putsf("Anda Tekan 6"); // Mencetak tulisan pada LCD
delay_ms(50); // Delay selama 50 ms
lcd_clear(); // Membersihkan / reset LCD
}
}
void main(void) // Fungsi utama
{
PORTD=0x00; // Deklarasi PORTD aktif low
DDRD=0x00; // Deklarasi PORTD sebagai output
PORTC=0xff; // Dekalarasi PORTC aktif high
DDRC=0x0f; // Deklarasi PORTC sebagai input dan output
lcd_init(16); // Menggunakan LCD tipe 16 * 2
while(2)
{
keypad(); // Memanggil keypad
if (PIND.0 == 1) // Jika PIND.0 ditekan aktif high
{
lcd_gotoxy(1,0); // Posisi tulisan pada LCD
lcd_putsf("Tekan Switch 1"); // Mencetak tulisan pada LCD
delay_ms(50); // Delay selama 50 ms
lcd_clear(); // Membersihkan /reset LCD
}
if (PIND.1 == 1) // Jika PIND.1 ditekan aktif high
{
lcd_gotoxy(1,1); // Posisi tulisan pada LCD
lcd_putsf("Tekan Angka 2"); // Mencetak tulisan pada LCD
delay_ms(50); // Delay selama 50 ms
lcd_clear(); // Membersihkan /reset LCD
}
if (PIND.2 == 1)
{ for (i=15;i>=0;i--)
{
lcd_gotoxy(i,1); // Posisi tulisan pada LCD
lcd_putsf("Anda Tekan 1"); // Mencetak tulisan pada LCD
delay_ms(50); // Delay selama 50 ms
lcd_clear(); // Membersihkan / reset LCD
};
}
}
} // Akhir program
Pada percobaan kali ini , sesuai dengan kondisi yang kelompok kami dapatkan , yaitu menampilkan karakter bergerak dari kanan ke kiri saat keypad angka 2 ditekan.
Pada rangkaian , saat ditekan tombol play untuk simulasi, maka pada LCD akan menampilkan karakter printah "tekan Angka 2". Saat angka 2 pada keypad ditekan, maka LCD akan menampilkan karakter "Angka 2 ditekan" yang bergerak dari kanan ke kiri LCD. Artinya , rangkian ini sudah sesuai dengan kondisi modul yang kelompok kami ambil.
Pda program ini , input nya adalah Keypad dan Switch, Unit Proccesing nya adalah ATMEGA 128, dan Output nya adalah LCD.
Untuk pengaturan program LCD, menampilkan karakter bergerak dari kanan ke kiri tersebut menggunakan fungsi FOR.
mikro modul 4
Mikrokontroller PIC 16F877A
- Merangkai dan menguji output pada mikrokontroller PIC 16F877A
- Merangkai dan menguji input pada mikrokontroller PIC 16F877A
- Merangkai dan menguji aplikasi I/O pada mikrokontroller PIC 16F877A
A. Mikrokontroller PIC 16F877A
Anggota keluarga PICmicro buatan Microchip Inc. cukup banyak. Ada yang menggunakan FLASH memori dan ada pula yang jenis OTP (One Time Programmable). Mikrontroler dari keluarga PICmicro yang popular, antara lain PIC2C08, PIC16C54, PIC16F84. Agar lebih mengenal PIC16F877A, berikut ini diberikan fitur-fitur penting yang terdapat pada PIC16F877A.

Fitur-Fitur PIC 16F877A
- RISC CPU yang mempunyai performance tinggi
- Hanya 35 jenis instruksi yang perlu dipelajari
- Semua instrujsi mempunyai siklus tunggal kecuali untuk instruksi percabangan.
- Kecepatan Instruksi: DC – 20 MHz clock input DC – 200 ns instruction cycle
- 8K x 14 words of FLASH Program Memory, 368 x 8 bytes of Data Memory (RAM) , 256 x 8 bytes of EEPROM Data Memory
- Pinout compatible dengan PIC16C73B/74B/76/77
- Interrupt (14 sumber interrupt)
- Delapan level hardware stack
- Direct, indirect dan relative addressing modes
- Power-on Reset (POR)
- Power-up Timer (PWRT) dan Oscillator Start-up Timer (OST)
- Watchdog Timer (WDT) dengan on-chip RC oscillator
- Programmable code protection dan Fully static design
- Power saving SLEEP mode
Deskripsi Pin Pin

Organisasi Memori
B.LED

C.LAYAR SEVEN SEGMENT

Layar tujuh segmen ini seringkali digunakan pada jam digital, meteran elektronik, dan perangkat elektronik lainnya yang menampilkan informasi numerik. Layar tujuh segmen ini terdiri dari 7 buah LED yang membentuk angka 8 dan 1 LED untuk titik/DP. Angka yang ditampilkan di seven segmen ini dari 0-9. Cara kerja dari seven segmen disesuaikan dengan LED. LED merupakan komponen diode yang dapat memancarkan cahaya. kondisi dalam keadaan ON jika sisi anode mendapatkan sumber positif dari Vcc dan katode mendapatkan sumber negatif dari ground.
D. BUZZER

Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm)
E. LCD



F. JUMPER

G. MOTOR STEPPER


(Motor stepper )mengubah pulsa-pulsa listrik yang diberikan menjadi gerakan-gerakan diskrit rotor yang disebut langkah (steps). Nilai rating dari suatu motor stepper diberikan dalam langkah per putaran (steps per revolution). Motor stepper umumnya mempunyai kecepatan dan [torsi] yang rendah.
Motor stepper bekerja berdasarkan pulsa-pulsa yang diberikan pada lilitan fasenya dalam urut-urutan yang tepat. Selain itu, pulsa-pulsa itu harus juga menyediakan arus yang cukup besar pada lilitan fase tersebut. Karena itu untuk pengoperasian motor stepper pertama-tama harus mendesain suatu sequencer logic untuk menentukan urutan pencatuan lilitan fase motor dan kemudian menggunkan suatu penggerak (driver) untuk menyediakan arus yang dibutuhkan oleh lilitan fase.
H. SENSOR LM35
Sensor suhu IC LM 35 merupkan chip IC produksi Natioanal Semiconductor yang berfungsi untuk mengetahui temperature suatu objek atau ruangan dalam bentuk besaran elektrik, atau dapat juga di definisikan sebagai komponen elektronika yang berfungsi untuk mengubah perubahan temperature yang diterima dalam perubahan besaran elektrik.

I. KEYPAD

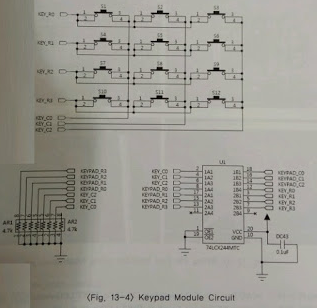

Penyusun tombol pada keypad dapat dibuat dari bermacam-macam bahan/komponen, seperti switch metal, switch karbon, dan resistif/kapasitif (touch panel). Penggunaan bahan tersebut disesuaikan dengan kebutuhan akan sensifitas, aksi penekanan, dan kebutuhan akan suatu tombol khusus. Bahan switch metal pada keypad digunakan untuk kebutuhan keypad atau tombol-tombol dengan arus yang besar. Keypad dengan bahan carbon dipakai untuk kebutuhan tombol-tombol dengan arus kecil. Biasanya itu digunakan untuk alat-alat digital yang hanya memilikitegangan 0 dan 5v. Penerapan bahan banyak kita jumpai seperti pada keypad remot tv, remot ac, joy stick, serta masih banyak lainnya.
J. SENSOR ULTRASONIC

- Transmitter Gelombang Ultrasonik
- Receiver Gelombang Ultrasonik
- Rangkaian kontrol
Jarak (cm) = Lama Waktu Pantul (uS) / 29.034 / 2
Rumus jarak didapat dari pembagian lama waktu pantul dengan kecepatan gelombang ultrasonik dan dibagi 2 karena pada saat pemantulan terjadi dua kali jarak tempuh antara sensor dengan objek. Yaitu pada saat gelombang dipancarkan dari transmitter ke objek dan pada saat gelombang memantul ke receiver ultrasonik.
K. DOTMATRIX
Dot matrix banyak digunakan untuk menampilkan informasi pada mesin-mesin, jam, indikator keberangkatan kereta api dan perangkat lainnya yang membutuhkan display sederhana untuk resolusi yang terbatas. Display ini terdiri dari LED yang tersusun secara matrix berbentuk segi empat (bentuk selain segi empat juga ada) sehingga dengan menyalakan/mematikan lampu yang diinginkan, teks atau grafik yang dapat ditampilkan. Pengendali dot matrix mengkonversi instruksi dari decoder ke dalam sinyal elektris yang dapat menyalakan atau mematikan lampu sehingga tampilan yang diinginkan dapat terjadi.


mikro modul 3
Mikrokontroller ATMEGA 8535
- Merangkai dan menguji aplikasi output pada mikrokontroller ATMEGA 8535
- Merangkai dan menguji aplikasi input pada mikrokontroller ATMEGA 8535
- Merangkai dan menguji I/O pada mikrokontroller ATMEGA 8535
A. Mikrokontroller AVR
Berikut gambar dari ATMEGA8535 :


B.LED
C.LAYAR SEVEN SEGMENT
Layar tujuh segmen ini seringkali digunakan pada jam digital, meteran elektronik, dan perangkat elektronik lainnya yang menampilkan informasi numerik. Layar tujuh segmen ini terdiri dari 7 buah LED yang membentuk angka 8 dan 1 LED untuk titik/DP. Angka yang ditampilkan di seven segmen ini dari 0-9. Cara kerja dari seven segmen disesuaikan dengan LED. LED merupakan komponen diode yang dapat memancarkan cahaya. kondisi dalam keadaan ON jika sisi anode mendapatkan sumber positif dari Vcc dan katode mendapatkan sumber negatif dari ground.
D. BUZZER
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm)
E. LCD
F. JUMPER
G. MOTOR STEPPER
(Motor stepper )mengubah pulsa-pulsa listrik yang diberikan menjadi gerakan-gerakan diskrit rotor yang disebut langkah (steps). Nilai rating dari suatu motor stepper diberikan dalam langkah per putaran (steps per revolution). Motor stepper umumnya mempunyai kecepatan dan [torsi] yang rendah.
Motor stepper bekerja berdasarkan pulsa-pulsa yang diberikan pada lilitan fasenya dalam urut-urutan yang tepat. Selain itu, pulsa-pulsa itu harus juga menyediakan arus yang cukup besar pada lilitan fase tersebut. Karena itu untuk pengoperasian motor stepper pertama-tama harus mendesain suatu sequencer logic untuk menentukan urutan pencatuan lilitan fase motor dan kemudian menggunkan suatu penggerak (driver) untuk menyediakan arus yang dibutuhkan oleh lilitan fase.
H. SENSOR LM35
Sensor suhu IC LM 35 merupkan chip IC produksi Natioanal Semiconductor yang berfungsi untuk mengetahui temperature suatu objek atau ruangan dalam bentuk besaran elektrik, atau dapat juga di definisikan sebagai komponen elektronika yang berfungsi untuk mengubah perubahan temperature yang diterima dalam perubahan besaran elektrik.
I. KEYPAD
Penyusun tombol pada keypad dapat dibuat dari bermacam-macam bahan/komponen, seperti switch metal, switch karbon, dan resistif/kapasitif (touch panel). Penggunaan bahan tersebut disesuaikan dengan kebutuhan akan sensifitas, aksi penekanan, dan kebutuhan akan suatu tombol khusus. Bahan switch metal pada keypad digunakan untuk kebutuhan keypad atau tombol-tombol dengan arus yang besar. Keypad dengan bahan carbon dipakai untuk kebutuhan tombol-tombol dengan arus kecil. Biasanya itu digunakan untuk alat-alat digital yang hanya memilikitegangan 0 dan 5v. Penerapan bahan banyak kita jumpai seperti pada keypad remot tv, remot ac, joy stick, serta masih banyak lainnya.
J. SENSOR ULTRASONIC
- Transmitter Gelombang Ultrasonik
- Receiver Gelombang Ultrasonik
- Rangkaian kontrol
Jarak (cm) = Lama Waktu Pantul (uS) / 29.034 / 2
Rumus jarak didapat dari pembagian lama waktu pantul dengan kecepatan gelombang ultrasonik dan dibagi 2 karena pada saat pemantulan terjadi dua kali jarak tempuh antara sensor dengan objek. Yaitu pada saat gelombang dipancarkan dari transmitter ke objek dan pada saat gelombang memantul ke receiver ultrasonik.
K. DOTMATRIX
Dot matrix banyak digunakan untuk menampilkan informasi pada mesin-mesin, jam, indikator keberangkatan kereta api dan perangkat lainnya yang membutuhkan display sederhana untuk resolusi yang terbatas. Display ini terdiri dari LED yang tersusun secara matrix berbentuk segi empat (bentuk selain segi empat juga ada) sehingga dengan menyalakan/mematikan lampu yang diinginkan, teks atau grafik yang dapat ditampilkan. Pengendali dot matrix mengkonversi instruksi dari decoder ke dalam sinyal elektris yang dapat menyalakan atau mematikan lampu sehingga tampilan yang diinginkan dapat terjadi.
mikro modul 2
Mikrokontroller ARDUINO 2560
- Merangkai dan menguji aplikasi output pada mikrokontroller Arduino
- Merangkai dan menguji aplikasi output pada mikrokontroller Arduino
- Merangkai dan menguji aplikasi output pada mikrokontroller Arduino
Beberapa fitur dari Arduino Mega 2560 ini adalah :

1. Bagian-bagian dari Arduino mega 2560
Soket USB
Input/output digital
Pin POWER
Tombol RESET
Jack Baterai/Adaptor
B.LED
C.LAYAR SEVEN SEGMENT
Layar tujuh segmen ini seringkali digunakan pada jam digital, meteran elektronik, dan perangkat elektronik lainnya yang menampilkan informasi numerik. Layar tujuh segmen ini terdiri dari 7 buah LED yang membentuk angka 8 dan 1 LED untuk titik/DP. Angka yang ditampilkan di seven segmen ini dari 0-9. Cara kerja dari seven segmen disesuaikan dengan LED. LED merupakan komponen diode yang dapat memancarkan cahaya. kondisi dalam keadaan ON jika sisi anode mendapatkan sumber positif dari Vcc dan katode mendapatkan sumber negatif dari ground.
D. BUZZER
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm)
E. LCD
F. JUMPER
G. MOTOR STEPPER
(Motor stepper )mengubah pulsa-pulsa listrik yang diberikan menjadi gerakan-gerakan diskrit rotor yang disebut langkah (steps). Nilai rating dari suatu motor stepper diberikan dalam langkah per putaran (steps per revolution). Motor stepper umumnya mempunyai kecepatan dan [torsi] yang rendah.
Motor stepper bekerja berdasarkan pulsa-pulsa yang diberikan pada lilitan fasenya dalam urut-urutan yang tepat. Selain itu, pulsa-pulsa itu harus juga menyediakan arus yang cukup besar pada lilitan fase tersebut. Karena itu untuk pengoperasian motor stepper pertama-tama harus mendesain suatu sequencer logic untuk menentukan urutan pencatuan lilitan fase motor dan kemudian menggunkan suatu penggerak (driver) untuk menyediakan arus yang dibutuhkan oleh lilitan fase.
H. SENSOR LM35
Sensor suhu IC LM 35 merupkan chip IC produksi Natioanal Semiconductor yang berfungsi untuk mengetahui temperature suatu objek atau ruangan dalam bentuk besaran elektrik, atau dapat juga di definisikan sebagai komponen elektronika yang berfungsi untuk mengubah perubahan temperature yang diterima dalam perubahan besaran elektrik.
I. KEYPAD
Penyusun tombol pada keypad dapat dibuat dari bermacam-macam bahan/komponen, seperti switch metal, switch karbon, dan resistif/kapasitif (touch panel). Penggunaan bahan tersebut disesuaikan dengan kebutuhan akan sensifitas, aksi penekanan, dan kebutuhan akan suatu tombol khusus. Bahan switch metal pada keypad digunakan untuk kebutuhan keypad atau tombol-tombol dengan arus yang besar. Keypad dengan bahan carbon dipakai untuk kebutuhan tombol-tombol dengan arus kecil. Biasanya itu digunakan untuk alat-alat digital yang hanya memilikitegangan 0 dan 5v. Penerapan bahan banyak kita jumpai seperti pada keypad remot tv, remot ac, joy stick, serta masih banyak lainnya.
J. SENSOR ULTRASONIC
- Transmitter Gelombang Ultrasonik
- Receiver Gelombang Ultrasonik
- Rangkaian kontrol
Jarak (cm) = Lama Waktu Pantul (uS) / 29.034 / 2
Rumus jarak didapat dari pembagian lama waktu pantul dengan kecepatan gelombang ultrasonik dan dibagi 2 karena pada saat pemantulan terjadi dua kali jarak tempuh antara sensor dengan objek. Yaitu pada saat gelombang dipancarkan dari transmitter ke objek dan pada saat gelombang memantul ke receiver ultrasonik.
K. DOTMATRIX
Dot matrix banyak digunakan untuk menampilkan informasi pada mesin-mesin, jam, indikator keberangkatan kereta api dan perangkat lainnya yang membutuhkan display sederhana untuk resolusi yang terbatas. Display ini terdiri dari LED yang tersusun secara matrix berbentuk segi empat (bentuk selain segi empat juga ada) sehingga dengan menyalakan/mematikan lampu yang diinginkan, teks atau grafik yang dapat ditampilkan. Pengendali dot matrix mengkonversi instruksi dari decoder ke dalam sinyal elektris yang dapat menyalakan atau mematikan lampu sehingga tampilan yang diinginkan dapat terjadi.
Social Profiles






Postingan Populer
-
 MODUL 1 Elektronika dan Sistem Digital [KEMBALI KE MENU SEBELUMNYA] DAFTAR ISI 1. Tujuan 2. Alat dan Bah...
MODUL 1 Elektronika dan Sistem Digital [KEMBALI KE MENU SEBELUMNYA] DAFTAR ISI 1. Tujuan 2. Alat dan Bah... -
 MODUL 3 Elektronika dan Sistem Digital [KEMBALI KE MENU SEBELUMNYA] DAFTAR ISI 1. Tujuan 2. Alat dan Bah...
MODUL 3 Elektronika dan Sistem Digital [KEMBALI KE MENU SEBELUMNYA] DAFTAR ISI 1. Tujuan 2. Alat dan Bah... -
 MODUL 2 Elektronika dan Sistem Digital [KEMBALI KE MENU SEBELUMNYA] DAFTAR ISI 1. Tujuan 2. Alat dan Bah...
MODUL 2 Elektronika dan Sistem Digital [KEMBALI KE MENU SEBELUMNYA] DAFTAR ISI 1. Tujuan 2. Alat dan Bah...